GSLC-Intelegensia Semu
1. Apa yang dimaksud Adversarial Search & Constraint Satisfaction Problems? Berikan contoh?
Adversary search merupakan teknik pencarian yang diterapkan dalam permainan game antara dua pihak yang saling berlawanan. Ruang keadaan dalam kasus ini direpresentasikan dengan pohon (tree) atau grafik, yang memuat giliran yang memungkinkan bagi kedua pemain. Setiap level ruang pencarian yang berlaku menunjukkan keadaan giliran yang hanya berlaku untuk satu pemain. Teknik pencarian ini terdiri atas dua tipe algoritma. Algoritma pertama yang lebih sederhana dinamakan MINIMAX, sedangkan yang lainnya (yang lebih kompleks) adalah Alpha-beta Cutoff Procedure.
Contoh : permainan Tic Tac Toe
Constraint Satisfaction Problem adalah suatu permasalahan seseorang harus mencari nilai untuk set variabel (finite) yang memenuhi set constraint (finite). Constraint Satisfaction Problem merupakan sebuah pendekatan dari problem yang bersifat matematis dengan tujuan menemukan keadaan atau obyek yang memenuhi sejumlah persyaratan atau kiteria. Sebuah Constraint diartikan sebagai batasan solusi memungkinkan dalam sebuah problem optimasi.
Contoh : Cryptarithmetic, Map-Coloring
2. Apa itu Propositional Logic? Berikan contoh?
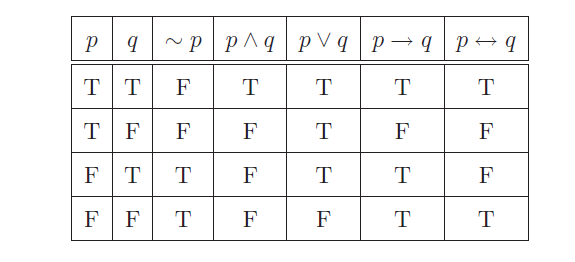
Logika Proposisi (Propositional Logic) menawarkan logika dalam bentuk sederhana sehingga mudah dipahami. Meskipun begitu, Logika Proposisi sudah mampu membantu menarik kesimpulan. Namun, banyak kasus yang muncul akan menjadi terlihat panjang dan rumit saat diwujudkan dalam bentuk Logika Proposisi. Dan itu bisa lebih panjang dan rumit dibandingkan problem itu sendiri.
Beberapa contoh operator logika adalah:
~ (negasi)
^ (konjungsi)
V (disjungsi)
=> (implikasi)
<=> (ekuivalensi)
Tabel kebenaran
Contoh :
p : motor itu bannya kurang angin
q : motor itu kehabisan bahan bakar
Motor itu bannya kurang angin dan kehabisan bahan bakar dapat disimbolkan dengan p ^ q
3. Buat coding (boleh C, C++ atau Java) untuk Algoritma A & Algoritma A* (A Star) ?
ArrayList SolutionPathList = new ArrayList();
//Create a node containing the goal state node_goal
Node node_goal = new Node(null,null,1,15,15);
//Create a node containing the start state node_start
Node node_start = new Node(null,node_goal,1,0,0);
//Create OPEN and CLOSED list
SortedCostNodeList OPEN = new SortedCostNodeList ();
SortedCostNodeList CLOSED = new SortedCostNodeList ();
//Put node_start on the OPEN list
OPEN.push (node_start);
//while the OPEN list is not empty
while (OPEN.Count>0)
{
//Get the node off the open list
//with the lowest f and call it node_current
Node node_current = OPEN.pop ();
//if node_current is the same state as node_goal we
//have found the solution;
//break from the while loop;
if (node_current.isMatch (node_goal))
{
node_goal.parentNode = node_current.parentNode ;
break;
}
//Generate each state node_successor that can come after node_current
ArrayList successors = node_current.GetSuccessors ();
//for each node_successor or node_current
foreach (Node node_successor in successors)
{
//Set the cost of node_successor to be the cost of node_current plus
//the cost to get to node_successor from node_current
//–> already set while we were getting successors
//find node_successor on the OPEN list
int oFound = OPEN.IndexOf (node_successor);
//if node_successor is on the OPEN list but the existing one is as good
//or better then discard this successor and continue
if (oFound>0)
{
Node existing_node = OPEN.NodeAt (oFound);
if (existing_node.CompareTo (node_current) <= 0)
continue;
}
//find node_successor on the CLOSED list
int cFound = CLOSED.IndexOf (node_successor);
//if node_successor is on the CLOSED list
//but the existing one is as good
//or better then discard this successor and continue;
if (cFound>0)
{
Node existing_node = CLOSED.NodeAt (cFound);
if (existing_node.CompareTo (node_current) <= 0 )
continue;
}
//Remove occurences of node_successor from OPEN and CLOSED
if (oFound!=-1)
OPEN.RemoveAt (oFound);
if (cFound!=-1)
CLOSED.RemoveAt (cFound);
//Set the parent of node_successor to node_current;
//–> already set while we were getting successors
//Set h to be the estimated distance to node_goal
//(Using heuristic function)
//–> already set while we were getting successors
//Add node_successor to the OPEN list
OPEN.push (node_successor);
}
//Add node_current to the CLOSED list
CLOSED.push (node_current);
}





